



 Videos of the games at the RoboCup 2017 in Nagoya, Japan recorded with a wide angle camera.
Videos of the games at the RoboCup 2017 in Nagoya, Japan recorded with a wide angle camera. RoboCup 2017, Nagoya/Japan
Videos of the games at the RoboCup 2017 in Nagoya, Japan recorded with a wide angle camera. Posted by mellmann on May 12, 2018
https://www.naoteamhumboldt.de/en/2018/05/robocup-2017-nagoyajapan/
test member
Supervisors: Prof. Dr. sc. nat. Verena V. Hafner, Prof. Dr. Hans-Dieter Burkhard Aktive Assoziierte Outstanding former members Our team has a long standing history in RoboCup and so is the legacy of it’s members. Here are a few outstanding members. Former Kirill Yasinovskiy, Oliver Welter (2008 – 2009), Tobias Herrmann, Jan Hieronymus, Alexander Borisov, Martin […]
Posted by mellmann on November 17, 2016
https://www.naoteamhumboldt.de/en/2016/11/deutsch-test-member/
SPL Qualifikation Video 2014
 Besides our current work on dynamic bipedal motions (walking, dribbling) and new approaches to situation modeling this video features some interesting game scenes from the RoboCup 2013 demonstrating the soccer performance of our robots.
Besides our current work on dynamic bipedal motions (walking, dribbling) and new approaches to situation modeling this video features some interesting game scenes from the RoboCup 2013 demonstrating the soccer performance of our robots. Posted by mellmann on December 14, 2013
https://www.naoteamhumboldt.de/en/2013/12/spl-qualifikation-video-2014/
SPL Qualifikation Video 2013
 In this video we briefly present the current state of our research on Nao related to RoboCup SPL. The main innovations for this year are our new, faster walk with dribbling capabilities; the new SimSpark simulator adapted for SPL, which is mainly used to develop and debug team behavior; and a much cleaner and stable code base (which is difficult to present in such a short video ;)
In this video we briefly present the current state of our research on Nao related to RoboCup SPL. The main innovations for this year are our new, faster walk with dribbling capabilities; the new SimSpark simulator adapted for SPL, which is mainly used to develop and debug team behavior; and a much cleaner and stable code base (which is difficult to present in such a short video ;) Posted by mellmann on January 21, 2013
https://www.naoteamhumboldt.de/en/2013/01/spl-qualifikations-video-2013/
(Deutsch) Infoabend 26.01 – 17:00
Am Donnerstag den 26.01 um 17:00 findet in unserem Labor (RUD 25, Raum 3.110) ein Infoabend zu unseren Projekten und Aktivitäten rund um den Roboter Nao und den Roboterfußball statt. Dabei zeigen wir unsere Roboter in Aktion, stellen Themen vor an denen wir gerade arbeiten und außerdem erfährst du, wie du bei uns mitmachen kannst. Du kannst dazu einfach ganz unverbindlich […]
Posted by mellmann on January 24, 2012
https://www.naoteamhumboldt.de/en/2012/01/deutsch-infoabend-26-01-1700/
SPL Qualification Video 2012
 In this video we briefly present the current state of our research on Nao related to RoboCup SPL. In particular we demonstrate omnidirectional walk, dynamic changing of the feet relation and step trajectory during the walk, player tracking, adaptive color detection, using of visual features for detection of the field side and self localization with same-colored goals.
In this video we briefly present the current state of our research on Nao related to RoboCup SPL. In particular we demonstrate omnidirectional walk, dynamic changing of the feet relation and step trajectory during the walk, player tracking, adaptive color detection, using of visual features for detection of the field side and self localization with same-colored goals. Posted by mellmann on January 19, 2012
https://www.naoteamhumboldt.de/en/2012/01/spl-qualification-video-2012/
RoBOW’11.2 – Info
Begin Friday 20 Mai around 14:00 c.t. End Sunday 22 Mai around 16:00 s.t. … schedule location food Videos from RoBOW’11.2 Teams NaoTH FUmanoids Nao-Team HTWK Nao Devils Bembelbots WF Wolves Talks Saturday: Modeling & Planing Active Local World Modelling (NaoTH) Lokalisierung und kooperatives Tracking von Gegnern und Ball (Devils) konkrete Anwendung von Potentialfeldern (FUManoids) […]
Posted by mellmann on May 3, 2011
https://www.naoteamhumboldt.de/en/2011/05/robow11-2/
RoBOW’11.2 – Info
Begin Friday 20 Mai around 14:00 c.t. End Sunday 22 Mai around 16:00 s.t. … schedule location food Videos from RoBOW’11.2 Teams NaoTH FUmanoids Nao-Team HTWK Nao Devils Bembelbots WF Wolves Talks Saturday: Modeling & Planing Active Local World Modelling (NaoTH) Lokalisierung und kooperatives Tracking von Gegnern und Ball (Devils) konkrete Anwendung von Potentialfeldern (FUManoids) […]
Posted by mellmann on May 3, 2011
https://www.naoteamhumboldt.de/en/2011/05/robow11-2-info/
RoBOW’11 Talks
Here is the List of Talks held during the RoBOW’11. The slides will be updated as soon as they arrive :) Calibration-Free Image Processing [PDF, 13.6MB] HTWK Line Projection without Camera Matrix HTWK Dynamic Kick [PDF, 0.8MB] NaoTH Selflocalization FUManoids Potential Fields for positioning and opponents avoidance NaoTH Behavior and Strategies [PDF, 1.9MB] FUManoids ZMP […]
Posted by mellmann on February 28, 2011
https://www.naoteamhumboldt.de/en/2011/02/robow_talks/
RoBOW’11 – Infos
Schedule
Posted by mellmann on February 21, 2011
https://www.naoteamhumboldt.de/en/2011/02/time-schedule/
NaoTH is qualified for RoboCup 2011 in the SPL!!!
Today we finally got the official decision from the technical committee: Congratulations, your team has been qualified to participate in RoboCup 2011 Standard Platform League. It means, that we are one of the 28 teams worldwide, which are qualified for the competition in Istanbul(!). More precise, it means: bright sun, beautiful sand beaches, Mediterranean sea, […]
Posted by mellmann on January 7, 2011
https://www.naoteamhumboldt.de/en/2011/01/naoth-is-qualified-for-robocup-2011-in-the-spl/
NaoTH ist qualifiziert für die RoboCup WM 2011 in SPL!!!
Heute haben wir endlich die Entscheidung des technischen Komitees erhalten: Congratulations, your team has been qualified to participate in RoboCup 2011 Standard Platform League. Das bedeutet wir sind eines der 28 Teams weltweit, die für die Weltmeisterschaft in Istanbul ausgewählt wurden! Genauer genommen bedeutet das: Viel Sonne, schöne Strände, warmes Mittelmeer, aber auch viele Vorbereitungen […]
Posted by mellmann on January 7, 2011
https://www.naoteamhumboldt.de/en/2011/01/naoth-ist-qualifiziert-fur-die-robocup-wm-2011-in-spl/
SPL Qualifikations-Video 2011

Posted by mellmann on December 26, 2010
https://www.naoteamhumboldt.de/en/2010/12/1055/
SPL Qualification Video 2011
In this video we briefly present the current state of our research on Nao related to RoboCup SPL. In particular we demonstrate omnidirectional walk, dynamic kick motion, player recognition based on SURF, percept correction and self localization. Posted by mellmann on December 26, 2010
https://www.naoteamhumboldt.de/en/2010/12/spl-qualification-video-2011/
Nao Team Humboldt ist Vizeweltmeister!!!
 Am 25 Juni ist die die diesjährige Weltmeisterschaft im Roboterfußball in Singapur zu ende gegangen. In verschiedenen Kategorien waren überwältigend viele Deutsche Teams in den Final-spielen beteiligt. Insbesondere hat das Nao Team Humboldt (NaoTH) des KI-Lehrstuhls der Humboldt Universität das Finale in der 3D Simulationsliga erreichen können. Um 11:00 Uhr Lokalzeit wurde das Finale in […]
Am 25 Juni ist die die diesjährige Weltmeisterschaft im Roboterfußball in Singapur zu ende gegangen. In verschiedenen Kategorien waren überwältigend viele Deutsche Teams in den Final-spielen beteiligt. Insbesondere hat das Nao Team Humboldt (NaoTH) des KI-Lehrstuhls der Humboldt Universität das Finale in der 3D Simulationsliga erreichen können. Um 11:00 Uhr Lokalzeit wurde das Finale in […] Posted by mellmann on October 4, 2010
https://www.naoteamhumboldt.de/en/2010/10/nao-team-humboldt-ist-vizeweltmeister/
Nao Team Humboldt gewinnt griechische Roboterfußball-Meisterschaft
Das Team der Berliner Humboldt Universität gewann am 5. Mai die erste griechische Robocup-Meisterschaft. Im Finale besiegte es nach einem nervenaufreibendem Match mit einem Elfmetertor die Gruppe “SPQR” der Universität Rom mit 1:0. Durch technische Probleme der Roboter mussten noch kurz vor dem Finalspiel fremde Roboter ausgeliehen werden, da zwei der eigenen Roboter den Dienst […]
Posted by mellmann on May 12, 2010
https://www.naoteamhumboldt.de/en/2010/05/nao-team-humboldt-gewinnt-griechische-roboterfussball-meisterschaft/
Presseberichte
RoboCup German Open: Lernen auf verschlungenen Pfaden RoboCup German Open: Bilderbuchpässe auf dem Middle-Size-Feld RoboCup German Open: Stuttgart ist draußen RoboCup ist ein Leuchtturmprojekt Der Intelligenzkicker: Künstliche Zweibeiner auf dem Weg zum Fußballweltmeister RoboCup 2010: Höfliche Einkaufshelfer, Absatzkicks und wendige Stürmer
Posted by mellmann on April 20, 2010
https://www.naoteamhumboldt.de/en/2010/04/presseberichte/
RomeCup 2010 KickOff Goal in the Finals

Posted by mellmann on March 26, 2010
https://www.naoteamhumboldt.de/en/2010/03/kickoff-goal-in-the-finals-of-romecup-2010/
RomeCup 2010 Final Penalty Goal

Posted by mellmann on March 26, 2010
https://www.naoteamhumboldt.de/en/2010/03/romecup-2010-final-penalty-goal/
Nao Team Humboldt ist Mediterranean-Vizemeister!!!
In einem sehr spannenden Halbfinale haben wir uns gegen das Französische Team “Les Trois Mousquetaires” behaupten können. Das Finalspiel gegen das Spanische Team ging zunächst 0:0 aus und so musste die Entscheidung in einem “Sudden Death” Elfmeterschießen getroffen werden. Beide Teams schossen jeweils ein Tor. Leider war aber der Spanische Torschütze 10 Sekunden schneller. Damit […]
Posted by mellmann on March 25, 2010
https://www.naoteamhumboldt.de/en/2010/03/nao-team-humboldt-ist-mediterranean-vizemeister/
X-Ray Nao und andere Abenteuer
Nach einer 12-stundigen Reise sind wir endlich in Rom angekommen. Wegen einer Panne mit der Frachtklappe zu spät in Berlin los geflogen, haben wir den Anschlussflug von Zürich nach Rom verpasst. Mit jeweils einem Essens-Gutschein von umgerechnet 10€ als Entschädigung durften wir also 5 Stunden lang die (zugegebenermaßen) entspannte Atmosphäre des Züricher Flughafens genießen. Die […]
Posted by mellmann on March 25, 2010
https://www.naoteamhumboldt.de/en/2010/03/x-ray-nao-und-andere-abenteuer/
Nao: searching for the ball
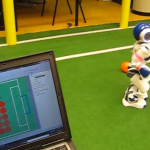 If the ball has not been seen for a while, nao beginns to search for it in a systematical way. On the screen of the laptop you can see the points of interest marked as red circles. When a point has just been seen its red and gets more transparent with the time it is […]
If the ball has not been seen for a while, nao beginns to search for it in a systematical way. On the screen of the laptop you can see the points of interest marked as red circles. When a point has just been seen its red and gets more transparent with the time it is […] Posted by mellmann on December 11, 2009
https://www.naoteamhumboldt.de/en/2009/12/nao-searching-for-the-ball/
Nao: Dynamic Kick

Posted by mellmann on December 10, 2009
https://www.naoteamhumboldt.de/en/2009/12/nao-dynamic-kick/
Nao get up from front

Posted by mellmann on December 9, 2009
https://www.naoteamhumboldt.de/en/2009/12/nao-get-up-from-front/
Nao get up from back

Posted by mellmann on December 9, 2009
https://www.naoteamhumboldt.de/en/2009/12/nao-get-up-from-back/